Design and Manufacturing Lab
Introduction
The Design and Manufacturing Lab (EML2322L) was a hands-on course that involved designing and manufacturing a robot capable of capturing, carrying, and discharging racquetballs to topple five targets within a five-minute time limit. The course emphasized a practical approach to engineering design, prototyping, and manufacturing.
Project Overview
The goal of this design project was to create a mobile robot capable of entering a controlled arena, capturing, carrying, and discharging balls to topple five sealed target bottles within a five-minute time limit. The project required teams to design, prototype, and compete with their robot against other teams in identical arena setups, simulating real-world engineering challenges with a strict budget and performance requirements.
Key Skills
- Collaborative Design Process: Led and participated in design sessions, employing decision matrices and sketches to evaluate and select the best robot concept from team members’ proposals.
- 3D Modeling and CAD: Used SolidWorks extensively to create detailed part models, preview assembly interactions, and ensure design accuracy for manufacturing.
- Advanced Manufacturing Techniques: Operated various machinery, including metalworking lathes, milling machines, bandsaws, CNC machines, and T-slot aluminum (8020) to fabricate key components of the robot.
- Sheet Metal Fabrication: Gained expertise in sheet metal bending and water jet cutting, applying these techniques to produce precise, durable parts for the robot.
- Prototyping and Testing: Assembled and tested the robot, iterating on the design to enhance performance within the competition's time constraints.
Problem Statement
In a 5′ x 20′ enclosed arena, five sealed target bottles containing water are positioned for toppling. Each team had access to either tennis or racquetballs stored in upright buckets within the arena. The primary task was to design a mobile robot that could efficiently release the provided balls to knock down all five targets within the five-minute time limit. Teams competed in adjacent arenas, requiring real-time strategy and precision to outperform competitors.
Design Rules
- Control System: Each robot used a standard wireless controller with two proportional and three relay-controlled motors.
- Size Contraints: The entire robot had to fit within a 17″ × 12″ × 15″ container after each lab session.
- Start Zone: Robots had to start within a designated area and could not be touched during the run.
- Ball Recovery: Balls that touched the floor couldn’t be reused, making efficiency in targeting essential.
- Material and Budget Contraints: A budget of $50 was allotted, and each team received a limited amount of aluminum extrusion and motors from the lab.
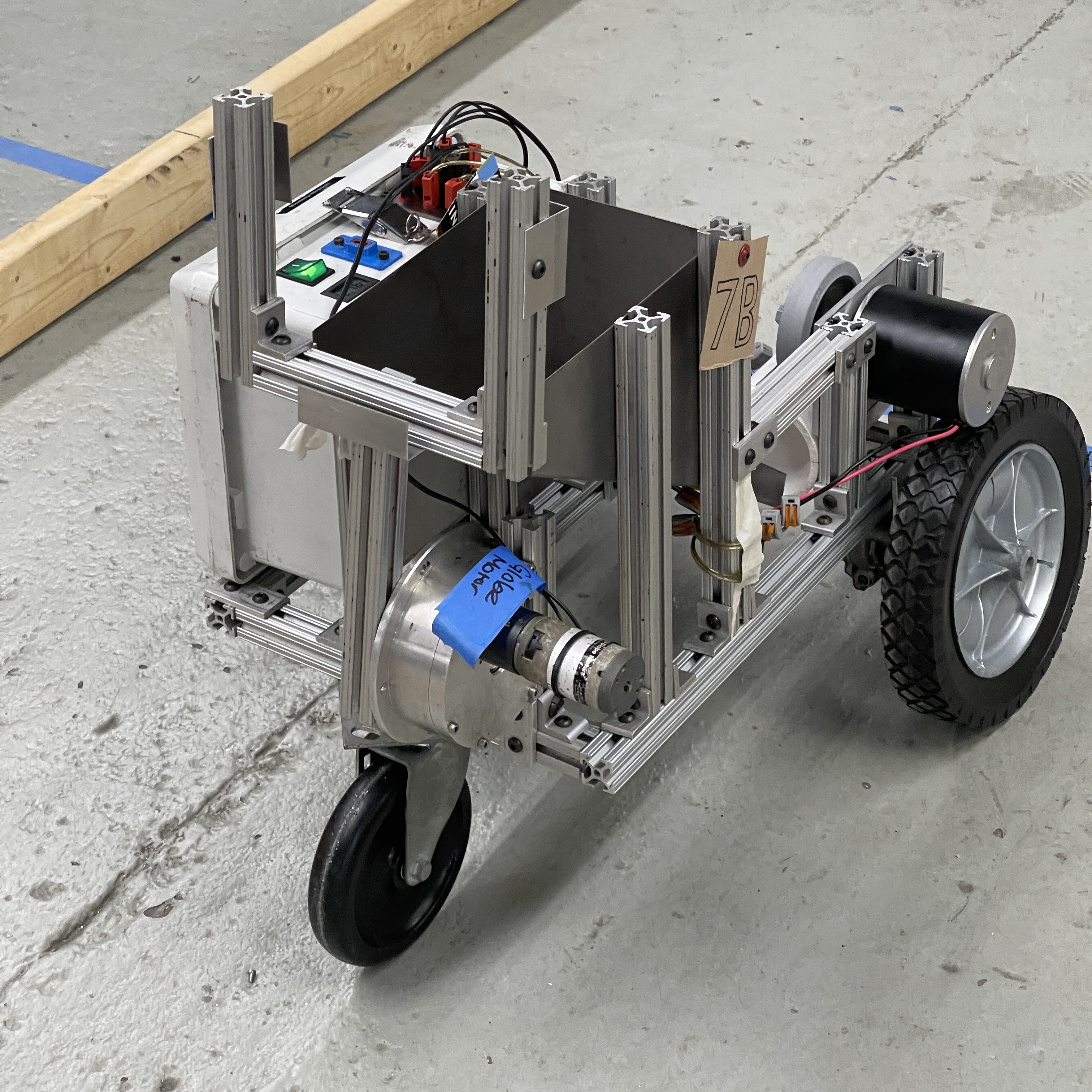
Final robot assembly showcasing the robust frame made from T-slot aluminum (8020) and precision-machined parts. The front-mounted ball collection system is designed to capture racquetballs efficiently for the target-toppling task.
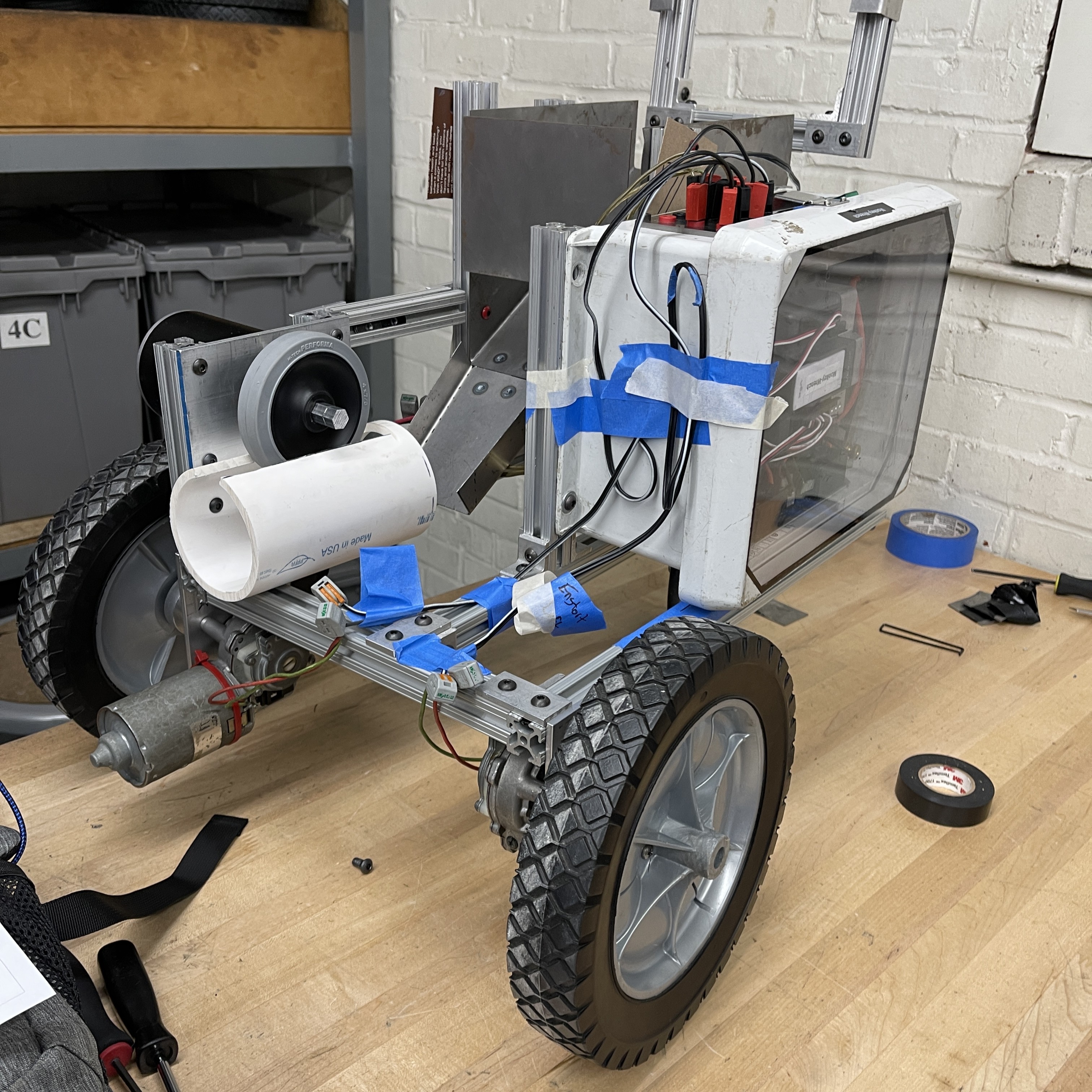
Close-up view of the robot’s drivetrain and custom-designed ball handling mechanism. The use of sheet metal bending and water jet cutting can be seen in the hopper that securely holds the racquetballs.

Robot in action during the testing phase in the competition arena. The wireless control system and custom motorized components allowed for precise ball deployment, meeting the design challenge of toppling five targets within five minutes.
Technical Drawing and Dimensioning
Final Robot Assembly
Full integration of the frame, hopper, and drivetrain, with exploded views illustrating assembly sequence and fastener placement.
Skills: Mechanical assembly sequencing, exploded view drafting, fastener specification
Frame Assembly
Structural T-slot aluminum frame design with precise dimensions for custom cuts, drilled holes, and attachment points for integrated components.
Skills: Frame design, precision dimensioning, CAD drafting
Hopper Assembly
Ball collection system design using bent sheet metal parts, with detailed cut and bend dimensions and clearly marked fastener locations.
Skills: Sheet metal fabrication, dimensioned drawing, assembly documentation
Mobile Platform
Wheelbase, motor mounts, and drivetrain layout with dimensioning to ensure clearance and alignment of wheels, axles, and moving parts.
Skills: Drivetrain design, tolerance analysis, mechanical alignment