Cow Digestor Simulator
Project Overview
The primary objectives of the Cow Digestor Simulator project are twofold: firstly, to develop, build, test, and evaluate a cattle digestion simulator unit that surpasses the performance of the legacy Virtus, Inc. units in their current upgraded form; and secondly, to extend and enhance their capabilities to meet the forward-looking customer needs of a modern commercial product. Ultimately, it was expected to deliver a functional prototype of a cattle digestion simulator for animal sciences research while robustly demonstrating its performance in an industrial research environment.
Motor RPM Analysis and Adjustments
Initial Design and Specification
Based on torque and speed requirements needed to stir a viscous substance similar to honey, a 19.1V DC motor was selected during the initial design phase. It operated at a max speed of 373 RPM, delivering 202 RPM under continuous torque of 16 in.-oz.
Testing and Prototyping
- Identified discrepancies between set and actual RPM during motor testing.
- Realigned the motor shaft and optimized bearing configurations to reduce friction.
Electrical Adjustments
- Discovered the motor was receiving 24V instead of 19.1V.
- Installed a DC-DC step-down converter to supply the correct voltage.
- Resolved wiring inconsistencies and improved signal reliability.
Troubleshooting
- Used a stop-motion camera to record motor rotation and calculate RPM via frame-by-frame analysis.
- Mapped RPM to microcontroller effort levels for precise performance tracking.
Results
Successfully minimized the discrepancy between set and actual RPM through iterative mechanical and electrical improvements, ensuring stable and reliable motor operation.
Code Implementation
The Arduino code below was used to read and display real-time motor speed on a 16x2 LCD, enabling accurate monitoring and control.
#include <LiquidCrystal_I2C.h>
LCD_I2C lcd(0x27); // For a 16 chars and 2 line display
int in1 = 8; // Declaring where the module is wired
int in2 = 9;
int ConA = 10; // PWM DI/DO pin
int speed1;
void setup() {
Serial.begin(9600);
lcd.begin();
lcd.backlight();
lcd.print("RPM: ");
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(ConA, OUTPUT);
}
void loop() {
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
speed1 = analogRead(A0);
speed1 = map(speed1, 0, 1023, 0, 255);
analogWrite(ConA, speed1); // Inject value to motor
if (speed1 < 90) {
speed1 = 0;
} else if (speed1 > 253) {
speed1 = 160;
} else {
speed1 = map(speed1, 90, 255, 25, 160);
}
Serial.println(speed1);
lcd.setCursor(5, 0);
if (speed1 < 100) {
lcd.print(" ");
}
if (speed1 < 10) {
lcd.print(" ");
}
lcd.print(speed1);
}
Code Explanation
- Libraries & Initialization: Uses LCD_I2C to control the display.
- Setup: Initializes pins and LCD screen.
- Loop: Reads analog input, maps it to PWM, updates display and serial output.
Challenges and Solutions
Motor speed discrepancies were addressed through real-time monitoring and fine-tuned adjustments, resulting in improved reliability and performance consistency.
Control Test for Motor Control Subsystem
In the video, we demonstrate the testing of the motor control subsystem for the Cow Digestor Simulator project. The video showcases all key components, including the power supply regulation, Arduino Nano, DC-DC step-down converters, potentiometer for speed adjustment, L298N motor driver, and the I2C LCD for visual feedback. Watch how our troubleshooting and adjustments led to precise motor control and consistent performance.
Motor Control System
Power Supply Regulation
- Managed the connection of a 24V power supply to the system, regulated by two DC-DC step-down converters.
- Ensured voltage reduction to 19.1V for the motor and to 5V for the Arduino Nano and other components.
Speed Adjustment
- Used a potentiometer knob to set desired motor speed, generating a varying analog voltage signal.
- Read analog signal (0-5V) with Arduino Nano and converted it to a digital value (0-1023).
PWM Signal Generation
- Calculated PWM duty cycle from the digital value.
- Generated PWM signals to the L298N motor driver to control motor speed/direction.
Visual Feedback
Provided RPM feedback through I2C LCD based on motor effort.
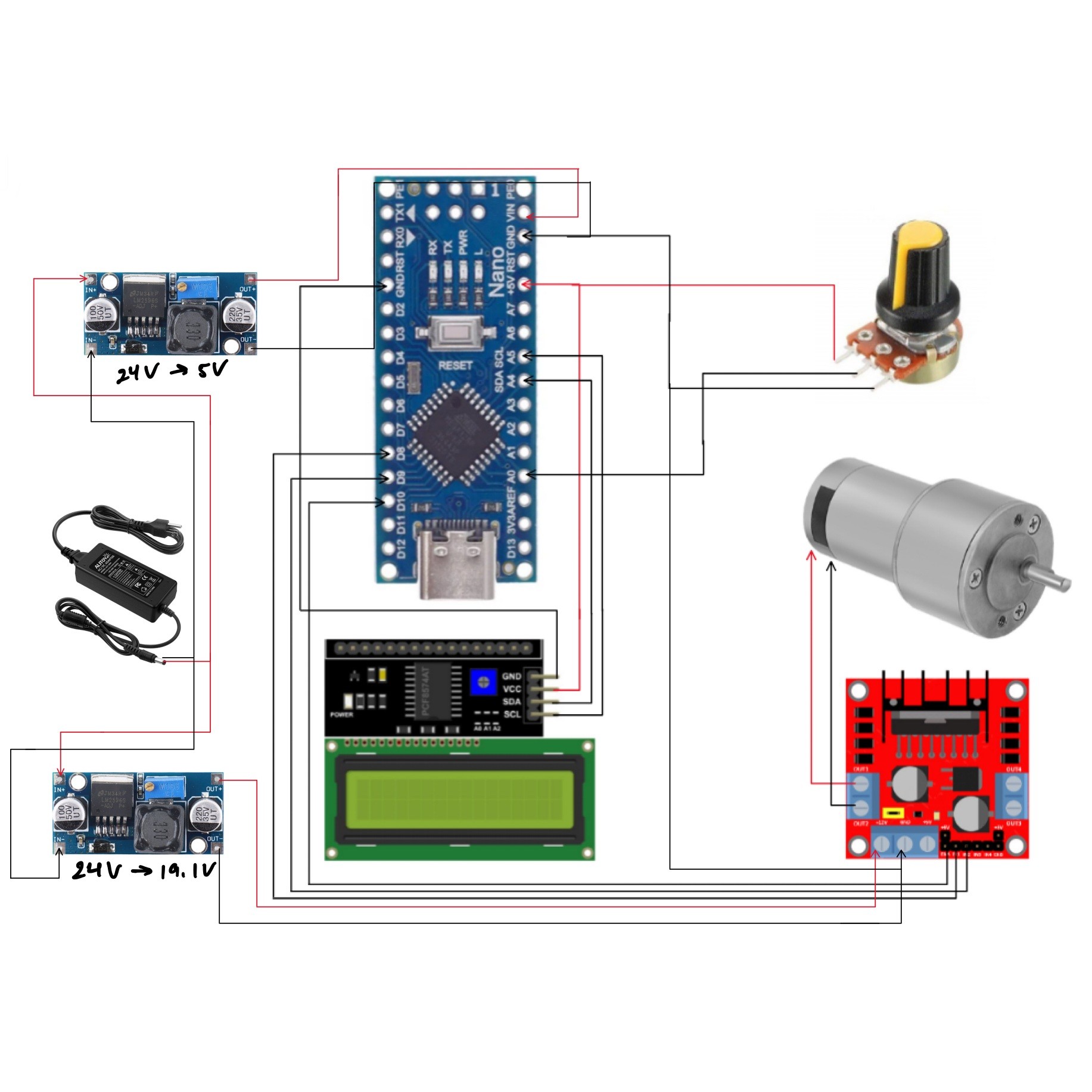
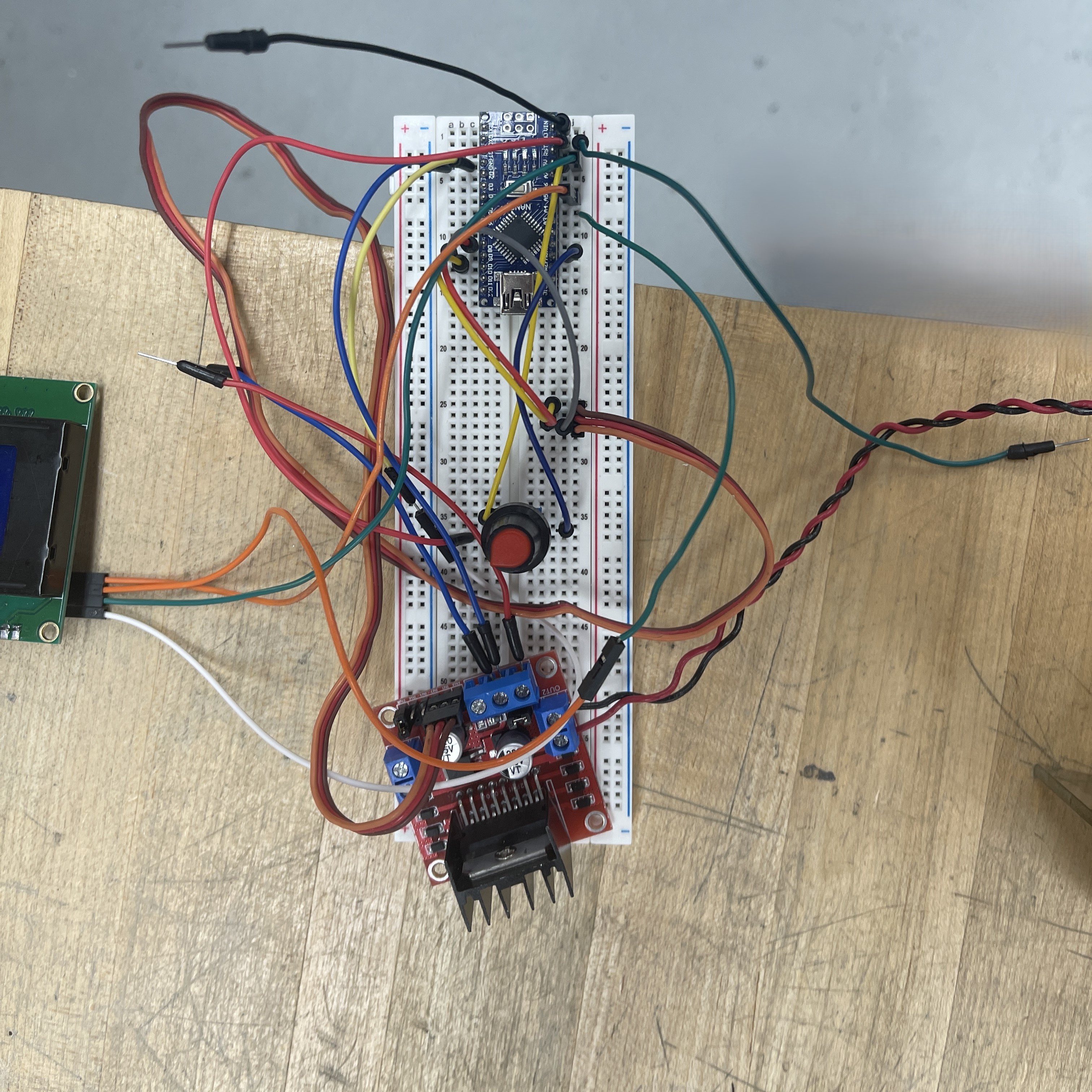
Wiring diagram and initial wiring of the motor control subsystem
3D Model of the Simulator
90-second Pitch Video
Experience our senior design capstone project at the University of Florida, where our team developed an innovative cattle digestion simulator in collaboration with the animal sciences lab. This 90s-style pitch video showcases our concept, focusing on easy cleaning with stainless steel construction and removable connections. Our design includes stick-on flexible heaters for uniform temperature distribution, enhancing performance and user safety. The project highlights rigorous testing, 3D-printed parts, and a user-friendly design for reliable, hygienic cow simulations.